
Product Description
Related Products


Tags (0)
Reviews (0)
Frequently bought together
Customers who bought this product also commonly purchased the following combination of items.





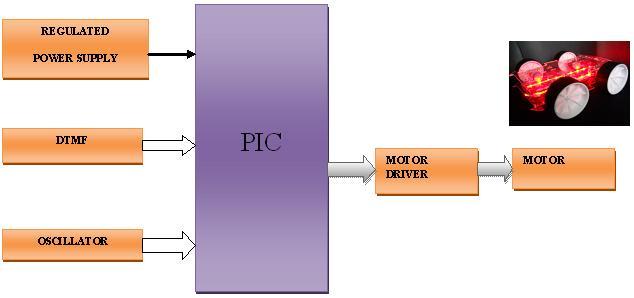
- This Item: Cell Phone Operated Landrover-PIC
-
DIY Automatic Meter Reading Kit- ATMEL
-
DIY Automatic Meter Reading Kit- ARM
-
DIY Vehicle Accident Informing System Kit-ARM
-
DIY Social Integration Kit- Raspberry Pi
-
Customers Who Bought This Item Also Bought
-
Out of stock
-
-
-


There are no product questions yet.